Double integrator: time minimisation
The problem consists in minimising the final time $t_f$ for the double integrator system
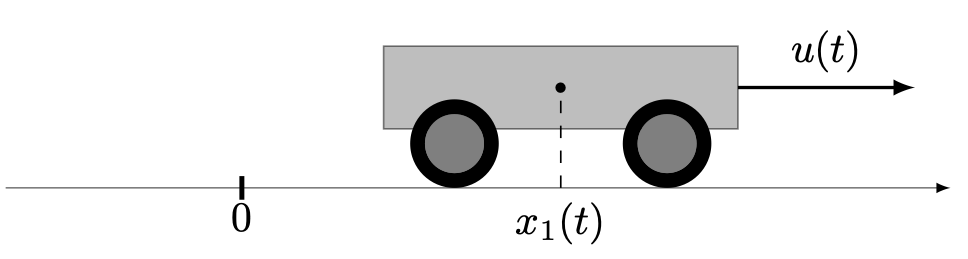
\[ \dot x_1(t) = x_2(t), \quad \dot x_2(t) = u(t), \quad u(t) \in [-1,1],\]
and the limit conditions
\[ x(0) = (1,2), \quad x(t_f) = (0,0).\]
This problem can be interpretated as a simple model for a wagon with constant mass moving along a line without fricton.
First, we need to import the OptimalControl.jl package:
using OptimalControlThen, we can define the problem
@def ocp begin
tf ∈ R, variable
t ∈ [ 0, tf ], time
x ∈ R², state
u ∈ R, control
tf ≥ 0
-1 ≤ u(t) ≤ 1
q = x₁
v = x₂
q(0) == 1
v(0) == 2
q(tf) == 0
v(tf) == 0
0 ≤ q(t) ≤ 5, (1)
-2 ≤ v(t) ≤ 3, (2)
ẋ(t) == [ v(t), u(t) ]
tf → min
endIn order to ensure convergence of the direct solver, we have added the state constraints labelled (1) and (2):
\[0 \leq q(t) \leq 5,\quad -2 \leq v(t) \leq 3,\quad t \in [ 0, t_f ].\]
Solve it
sol = solve(ocp)Method = (:direct, :adnlp, :ipopt)
This is Ipopt version 3.14.14, running with linear solver MUMPS 5.6.2.
Number of nonzeros in equality constraint Jacobian...: 1004
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 202
Total number of variables............................: 304
variables with only lower bounds: 1
variables with lower and upper bounds: 303
variables with only upper bounds: 0
Total number of equality constraints.................: 204
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 1.0000000e-01 1.90e+00 0.00e+00 0.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 9.9999010e-04 1.88e+00 2.32e+01 -5.7 1.10e+01 - 8.53e-02 8.99e-03h 1
2 9.9900010e-06 1.88e+00 6.44e+03 -5.7 1.84e+03 - 5.27e-04 1.07e-04h 1
3r 9.9900010e-06 1.88e+00 9.99e+02 0.3 0.00e+00 - 0.00e+00 2.68e-07R 3
4r 1.8899160e-03 1.74e+00 4.65e+02 -0.7 4.77e-01 - 4.73e-01 5.34e-01f 1
5r 1.4658984e-01 1.73e+00 2.09e+01 -1.1 1.45e-01 2.0 9.79e-01 1.00e+00f 1
6r 2.9193546e-01 1.70e+00 4.08e+01 -0.8 1.70e-01 2.4 1.00e+00 8.53e-01f 1
7r 3.5836667e-01 1.70e+00 4.73e+01 -0.9 6.64e-02 2.9 1.00e+00 1.00e+00f 1
8r 5.9834814e-01 1.70e+00 7.36e+01 -0.9 3.75e-01 2.4 9.65e-01 6.40e-01f 1
9r 7.2398061e-01 1.70e+00 9.10e+01 -1.7 1.48e-01 2.8 1.00e+00 8.51e-01f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
10r 8.4184963e-01 1.71e+00 4.59e+02 -1.7 6.10e-01 2.3 1.00e+00 1.93e-01f 1
11r 9.4835839e-01 1.72e+00 7.81e+02 -1.3 3.80e-01 1.8 1.00e+00 2.80e-01f 1
12r 1.0283813e+00 1.71e+00 8.78e+02 -1.6 5.91e-01 1.4 1.00e+00 1.67e-01f 1
13r 1.0666091e+00 1.66e+00 2.42e+02 -2.8 1.71e-01 1.8 1.00e+00 5.19e-01f 1
14 5.7360280e-01 1.56e+00 5.29e+01 0.3 1.05e+01 - 2.58e-01 6.17e-02h 1
15 6.1993703e-01 1.56e+00 7.19e+01 -5.7 4.08e+02 - 2.38e-03 2.47e-03h 1
16 7.2554684e-01 1.55e+00 7.04e+01 -5.7 1.98e+02 - 6.46e-03 2.79e-03h 1
17 9.7142594e-01 1.53e+00 5.07e+01 -5.7 6.37e+01 - 1.85e-02 1.07e-02h 1
18 1.6662909e+00 1.45e+00 1.50e+01 0.5 1.28e+01 - 1.10e-01 5.58e-02f 1
19 7.3295731e+00 1.70e-01 4.17e+02 0.3 6.42e+00 - 6.24e-01 8.83e-01f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
20 6.1520840e+00 1.78e-02 1.48e+02 0.1 1.41e+00 - 1.00e+00 9.21e-01h 1
21 6.2752208e+00 2.09e-04 1.72e+01 -0.5 2.95e-01 - 9.95e-01 9.90e-01f 1
22 6.2660417e+00 1.86e-06 6.24e+00 -2.2 1.23e-02 - 1.00e+00 9.91e-01h 1
23 5.6695137e+00 1.84e-03 2.90e-02 -2.8 5.97e-01 - 1.00e+00 1.00e+00f 1
24 5.5118889e+00 7.92e-04 6.45e+02 -3.3 5.19e-01 - 9.78e-01 1.00e+00h 1
25 5.4861365e+00 1.97e-04 6.37e+03 -3.8 5.63e-01 - 1.00e+00 8.15e-01h 1
26 5.4663359e+00 4.94e-05 6.71e+01 -4.8 5.00e-01 - 1.00e+00 9.97e-01h 1
27 5.4649557e+00 7.68e-08 1.39e-07 -5.8 6.24e-03 - 1.00e+00 1.00e+00h 1
28 5.4648096e+00 1.42e-09 3.60e-01 -11.0 1.33e-03 - 9.97e-01 1.00e+00h 1
29 5.4648096e+00 4.44e-16 3.99e-16 -10.3 1.55e-06 - 1.00e+00 1.00e+00h 1
Number of Iterations....: 29
(scaled) (unscaled)
Objective...............: 5.4648095606409361e+00 5.4648095606409361e+00
Dual infeasibility......: 3.9885413453548932e-16 3.9885413453548932e-16
Constraint violation....: 4.4408920985006262e-16 4.4408920985006262e-16
Variable bound violation: 9.5654382192833509e-09 9.5654382192833509e-09
Complementarity.........: 5.0382564513651442e-11 5.0382564513651442e-11
Overall NLP error.......: 5.0382564513651442e-11 5.0382564513651442e-11
Number of objective function evaluations = 34
Number of objective gradient evaluations = 21
Number of equality constraint evaluations = 34
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 31
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 29
Total seconds in IPOPT = 0.585
EXIT: Optimal Solution Found.and plot the solution
plot(sol, size=(600, 450))