OptimalControl.jl
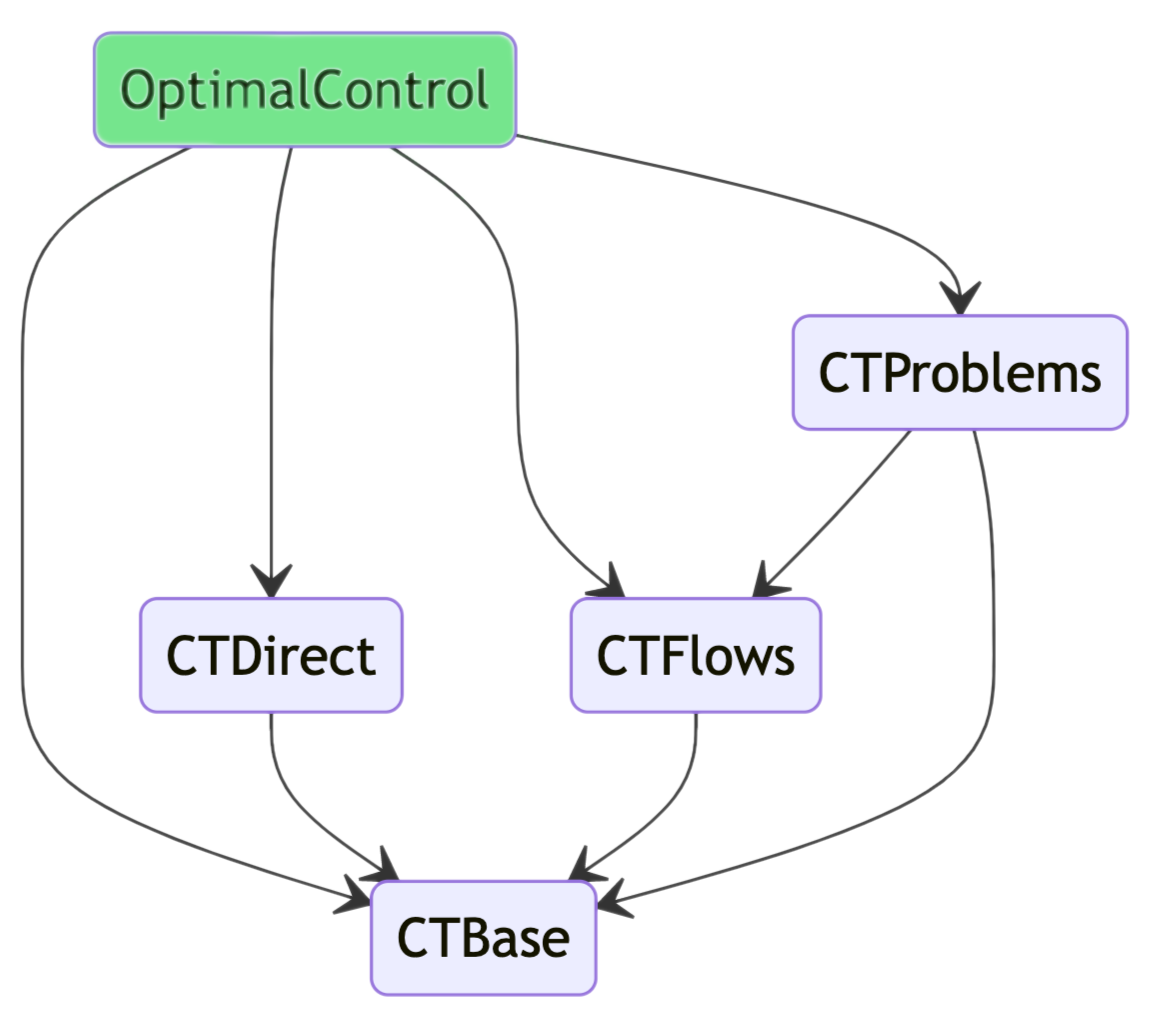
The OptimalControl.jl package aims to provide tools to solve optimal control problems by direct and indirect methods. It is part of the control-toolbox ecosystem:
To install a package from the control-toolbox ecosystem, please visit the installation page. The documentation is accessible from the main menu.
An optimal control problem with fixed initial and final times can be described as minimising the cost functional
\[g(x(t_0), x(t_f)) + \int_{t_0}^{t_f} f^{0}(t, x(t), u(t))~\mathrm{d}t\]
where the state $x$ and the control $u$ are functions subject, for $t \in [t_0, t_f]$, to the differential constraint
\[ \dot{x}(t) = f(t, x(t), u(t))\]
and other constraints such as
\[\begin{array}{llcll} ~\xi_l &\le& \xi(t, u(t)) &\le& \xi_u, \\ \eta_l &\le& \eta(t, x(t)) &\le& \eta_u, \\ \psi_l &\le& \psi(t, x(t), u(t)) &\le& \psi_u, \\ \phi_l &\le& \phi(t_0, x(t_0), t_f, x(t_f)) &\le& \phi_u. \end{array}\]
See our tutorials to get started solving optimal control problems.