Basic example (functional version)
Let us consider a wagon moving along a rail, whom acceleration can be controlled by a force $u$. We denote by $x = (x_1, x_2)$ the state of the wagon, that is its position $x_1$ and its velocity $x_2$.
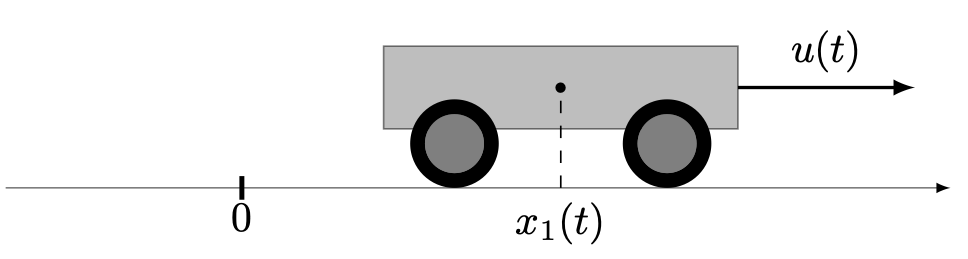
We assume that the mass is constant and unitary and that there is no friction. The dynamics we consider is given by
\[ \dot x_1(t) = x_2(t), \quad \dot x_2(t) = u(t), \quad u(t) \in \R,\]
which is simply the double integrator system. Les us consider a transfer starting at time $t_0 = 0$ and ending at time $t_f = 1$, for which we want to minimise the transfer energy
\[ \frac{1}{2}\int_{0}^{1} u^2(t) \, \mathrm{d}t\]
starting from the condition $x(0) = (-1, 0)$ and with the goal to reach the target $x(1) = (0, 0)$.
See the page Double integrator: energy minimisation for the analytical solution and details about this problem.
First, we need to import the OptimalControl.jl package:
using OptimalControlThen, we can define the problem
ocp = Model() # empty optimal control problem
time!(ocp, [ 0, 1 ]) # time interval
state!(ocp, 2) # dimension of the state
control!(ocp, 1) # dimension of the control
constraint!(ocp, :initial, [ -1, 0 ]) # initial condition
constraint!(ocp, :final, [ 0, 0 ]) # final condition
dynamics!(ocp, (x, u) -> [ x[2], u ]) # dynamics of the double integrator
objective!(ocp, :lagrange, (x, u) -> 0.5u^2) # cost in Lagrange formThere are two ways to define an optimal control problem:
- using functions like in this example, see also the
Modeldocumentation for more details. - using an abstract formulation. You can compare both ways taking a look at the abstract version of this basic example.
Solve it
sol = solve(ocp)Method = (:direct, :adnlp, :ipopt)
This is Ipopt version 3.14.14, running with linear solver MUMPS 5.6.2.
Number of nonzeros in equality constraint Jacobian...: 1205
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 101
Total number of variables............................: 404
variables with only lower bounds: 0
variables with lower and upper bounds: 0
variables with only upper bounds: 0
Total number of equality constraints.................: 305
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 1.0000000e-01 1.10e+00 1.92e-14 0.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 -5.0000000e-03 1.81e-01 1.78e-15 -11.0 6.04e+00 - 1.00e+00 1.00e+00h 1
2 6.0023829e+00 8.88e-16 1.78e-15 -11.0 6.01e+00 - 1.00e+00 1.00e+00h 1
Number of Iterations....: 2
(scaled) (unscaled)
Objective...............: 6.0023829460295719e+00 6.0023829460295719e+00
Dual infeasibility......: 1.7763568394002505e-15 1.7763568394002505e-15
Constraint violation....: 8.8817841970012523e-16 8.8817841970012523e-16
Variable bound violation: 0.0000000000000000e+00 0.0000000000000000e+00
Complementarity.........: 0.0000000000000000e+00 0.0000000000000000e+00
Overall NLP error.......: 1.7763568394002505e-15 1.7763568394002505e-15
Number of objective function evaluations = 3
Number of objective gradient evaluations = 3
Number of equality constraint evaluations = 3
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 3
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 2
Total seconds in IPOPT = 1.922
EXIT: Optimal Solution Found.and plot the solution
plot(sol, size=(600, 450))