The functional syntax to define an optimal control problem
There are two syntaxes to define an optimal control problem with OptimalControl.jl:
- the standard way is to use the abstract syntax. See for instance basic example for a start or for a comprehensive introduction to the abstract syntax, check this tutorial.
- the old-fashioned functional syntax. In this tutorial with give two examples defined with the functional syntax. For more details please check the
Modeldocumentation.
Double integrator: energy minimisation
Let us consider a wagon moving along a rail, whom acceleration can be controlled by a force $u$. We denote by $x = (x_1, x_2)$ the state of the wagon, that is its position $x_1$ and its velocity $x_2$.
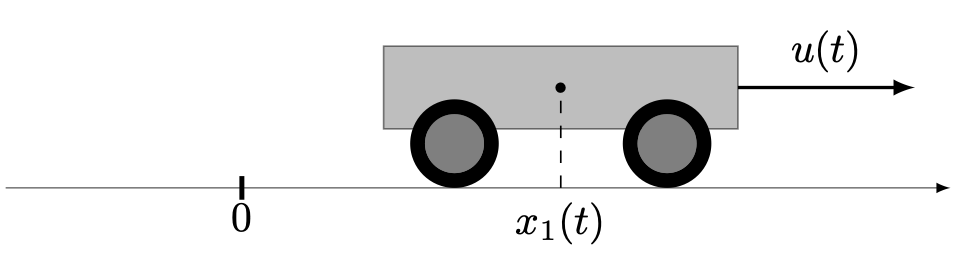
We assume that the mass is constant and unitary and that there is no friction. The dynamics we consider is given by
\[ \dot x_1(t) = x_2(t), \quad \dot x_2(t) = u(t), \quad u(t) \in \R,\]
which is simply the double integrator system. Les us consider a transfer starting at time $t_0 = 0$ and ending at time $t_f = 1$, for which we want to minimise the transfer energy
\[ \frac{1}{2}\int_{0}^{1} u^2(t) \, \mathrm{d}t\]
starting from the condition $x(0) = (-1, 0)$ and with the goal to reach the target $x(1) = (0, 0)$.
Let us define the problem with the functional syntax.
using OptimalControl
ocp = Model() # empty optimal control problem
time!(ocp, t0=0, tf=1) # initial and final times
state!(ocp, 2) # dimension of the state
control!(ocp, 1) # dimension of the control
constraint!(ocp, :initial; val=[ -1, 0 ]) # initial condition
constraint!(ocp, :final; val=[ 0, 0 ]) # final condition
dynamics!(ocp, (x, u) -> [ x[2], u ]) # dynamics of the double integrator
objective!(ocp, :lagrange, (x, u) -> 0.5u^2) # cost in Lagrange formThis problem is defined with the abstract syntax here.
Double integrator: time minimisation
We consider the same optimal control problem where we replace the cost. Instead of minimisation the L2-norm of the control, we consider the time minimisation problem, that is we minimise the final time $t_f$.
ocp = Model(variable=true) # variable is true since tf is free
variable!(ocp, 1, :tf) # dimension and name of the variable
time!(ocp, t0=0, indf=1) # initial time fixed to 0
# final time free and corresponds to the
# first component of the variable
state!(ocp, 2, :x, [:q, :v]) # dimension of the state with names
control!(ocp, 1) # dimension of the control
constraint!(ocp, :variable; lb=0) # tf ≥ 0
constraint!(ocp, :control; lb=-1, ub=1) # -1 ≤ u(t) ≤ 1
constraint!(ocp, :initial; val=[ 1, 2 ]) # initial condition
constraint!(ocp, :final; val=[ 0, 0 ]) # final condition
constraint!(ocp, :state; lb=[-5, -3], ub=[5, 3]) # -5 ≤ q(t) ≤ 5, -3 ≤ v(t) ≤ 3
dynamics!(ocp, (x, u, tf) -> [ x[2], u ]) # dynamics of the double integrator
objective!(ocp, :mayer, (x0, xf, tf) -> tf) # cost in Mayer formThis problem is defined with the abstract syntax here.