Loss control regions in optimal control problems
Introduction
General context. Optimal control theory studies controlled systems to achieve desired targets with minimal cost. The Pontryagin maximum principle (PMP, in short) provides necessary conditions for optimality, ensuring an adjoint vector (or costate) meets the Hamiltonian maximization condition[1].
Typically, optimal control involves permanent control, allowing modification of the control function at each time instant. However, practical constraints can lead to nonpermanent control. For instance, digital controls result in sampled-data control with discrete changes[3],[4]. In aerospace, eclipse constraints limit control for solar-powered satellites in a shadow region where the control is reduced to zero[5]. Hence, it is desirable to keep the system outside these regions.
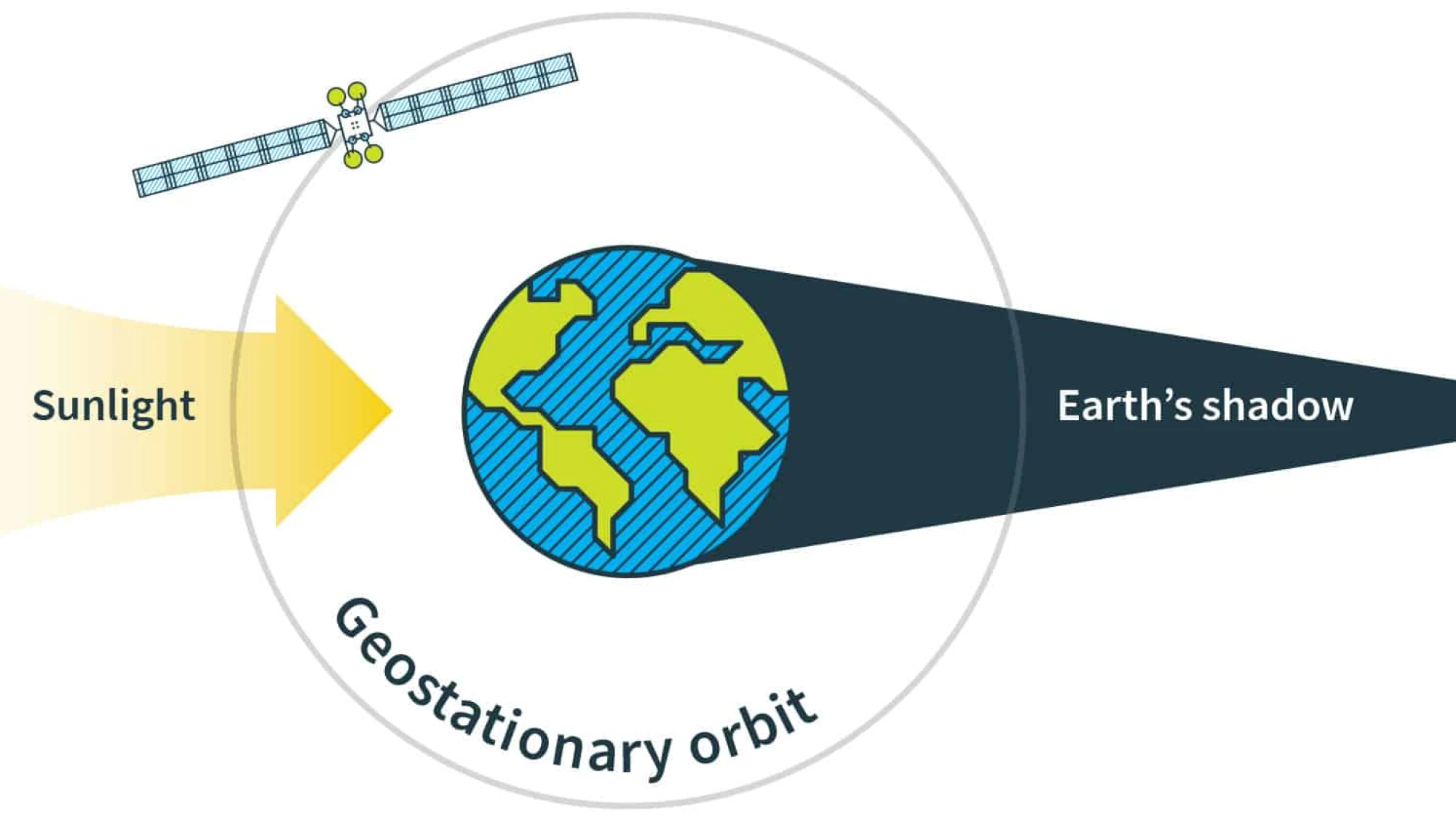
Objective and approach. Here, we address optimal control problems with loss control regions (we refer to [2] for further details), where the state space is divided into control regions and loss control regions. In control regions, control can change at any time, while in loss control regions, control must remain constant, though its value is to be optimized and can vary with each visit.
We extend our previous work by using a permanent control for control regions and a regionally switching parameter for loss control regions. This leads to a discontinuous dynamics framework, fitting into optimal control problems involving spatially heterogeneous dynamics[2],[5]. The hybrid maximum principle (HMP, in short) extends the PMP to hybrid settings[2],[5], with a piecewise absolutely continuous adjoint vector.
Numerical contribution. In this note we illustrate a two-step numerical method for optimal control problems with loss control regions. First, a direct numerical approach is applied to a regularized problem to manage discontinuities and outline the optimal trajectory's structure. Second, this helps initialize an indirect numerical method for the original problem, using the PMP with loss control regions. The method incorporates the averaged Hamiltonian gradient condition[3],[4] and adjoint vector discontinuities to define an appropriate shooting function, adding to classical terms for non-hybrid optimal control problems.
- Provide a statement of the PMP with loss control regions.
- Provide a direct method for solving optimal control problems with loss control regions (based on a regularization technique).
- Provide an indirect method (shooting method) for solving optimal control problems with loss control regions using the PMP with loss control regions.
Reproducibility
You can download the exact environment used to build this documentation:
📦 Project.toml - Package dependencies
📋 Manifest.toml - Complete dependency tree with versions
ℹ️ Version info
Julia Version 1.12.6
Commit 15346901f00 (2026-04-09 19:20 UTC)
Build Info:
Official https://julialang.org release
Platform Info:
OS: Linux (x86_64-linux-gnu)
CPU: 4 × AMD EPYC 9V74 80-Core Processor
WORD_SIZE: 64
LLVM: libLLVM-18.1.7 (ORCJIT, znver4)
GC: Built with stock GC
Threads: 1 default, 1 interactive, 1 GC (on 4 virtual cores)
Environment:
JULIA_PKG_SERVER_REGISTRY_PREFERENCE = eager📦 Package status
Status `~/work/LossControl.jl/LossControl.jl/docs/Project.toml`
[27a7e980] Animations v0.4.2
[e30172f5] Documenter v1.17.0
[6a3a0e7e] LossControl v0.4.0 `~/work/LossControl.jl/LossControl.jl`
[f4238b75] NLPModelsIpopt v0.11.3
[8913a72c] NonlinearSolve v4.17.1
[5f98b655] OptimalControl v2.0.0
[1dea7af3] OrdinaryDiffEq v6.111.0
[91a5bcdd] Plots v1.41.6📚 Complete manifest
Status `~/work/LossControl.jl/LossControl.jl/docs/Manifest.toml`
[54578032] ADNLPModels v0.8.13
[47edcb42] ADTypes v1.21.0
[a4c015fc] ANSIColoredPrinters v0.0.1
[1520ce14] AbstractTrees v0.4.5
[7d9f7c33] Accessors v0.1.44
[79e6a3ab] Adapt v4.5.2
[66dad0bd] AliasTables v1.1.3
[27a7e980] Animations v0.4.2
[4fba245c] ArrayInterface v7.23.0
[a9b6321e] Atomix v1.1.3
[d1d4a3ce] BitFlags v0.1.9
[62783981] BitTwiddlingConvenienceFunctions v0.1.6
[70df07ce] BracketingNonlinearSolve v1.12.1
[2a0fbf3d] CPUSummary v0.2.7
[54762871] CTBase v0.18.7
[790bbbee] CTDirect v1.0.6
[1c39547c] CTFlows v0.8.23
[34c4fa32] CTModels v0.9.14
[32681960] CTParser v0.8.13
[d3e8d392] CTSolvers v0.4.14
[d360d2e6] ChainRulesCore v1.26.1
[fb6a15b2] CloseOpenIntervals v0.1.13
[944b1d66] CodecZlib v0.7.8
[35d6a980] ColorSchemes v3.31.0
[3da002f7] ColorTypes v0.12.1
[c3611d14] ColorVectorSpace v0.11.0
[5ae59095] Colors v0.13.1
[38540f10] CommonSolve v0.2.6
[bbf7d656] CommonSubexpressions v0.3.1
[f70d9fcc] CommonWorldInvalidations v1.0.0
[34da2185] Compat v4.18.1
[a33af91c] CompositionsBase v0.1.2
[2569d6c7] ConcreteStructs v0.2.3
[f0e56b4a] ConcurrentUtilities v2.5.1
[187b0558] ConstructionBase v1.6.0
[d38c429a] Contour v0.6.3
[adafc99b] CpuId v0.3.1
[9a962f9c] DataAPI v1.16.0
[864edb3b] DataStructures v0.19.4
[8bb1440f] DelimitedFiles v1.9.1
[2b5f629d] DiffEqBase v6.215.0
[163ba53b] DiffResults v1.1.0
[b552c78f] DiffRules v1.15.1
[a0c0ee7d] DifferentiationInterface v0.7.16
[ffbed154] DocStringExtensions v0.9.5
[e30172f5] Documenter v1.17.0
[4e289a0a] EnumX v1.0.7
[f151be2c] EnzymeCore v0.8.19
[1037b233] ExaModels v0.9.7
[460bff9d] ExceptionUnwrapping v0.1.11
[d4d017d3] ExponentialUtilities v1.30.0
[e2ba6199] ExprTools v0.1.10
[55351af7] ExproniconLite v0.10.14
[c87230d0] FFMPEG v0.4.5
[7034ab61] FastBroadcast v1.3.1
[9aa1b823] FastClosures v0.3.2
[442a2c76] FastGaussQuadrature v1.1.0
[a4df4552] FastPower v1.3.1
[1a297f60] FillArrays v1.16.0
[6a86dc24] FiniteDiff v2.29.0
[53c48c17] FixedPointNumbers v0.8.5
[1fa38f19] Format v1.3.7
[f6369f11] ForwardDiff v1.3.3
[069b7b12] FunctionWrappers v1.1.3
[77dc65aa] FunctionWrappersWrappers v1.4.0
[46192b85] GPUArraysCore v0.2.0
[28b8d3ca] GR v0.73.24
[c145ed77] GenericSchur v0.5.6
[d7ba0133] Git v1.5.0
[42e2da0e] Grisu v1.0.2
[cd3eb016] HTTP v1.11.0
[b5f81e59] IOCapture v1.0.0
[615f187c] IfElse v0.1.1
[3587e190] InverseFunctions v0.1.17
[b6b21f68] Ipopt v1.14.1
[92d709cd] IrrationalConstants v0.2.6
[82899510] IteratorInterfaceExtensions v1.0.0
[1019f520] JLFzf v0.1.11
[692b3bcd] JLLWrappers v1.7.1
[682c06a0] JSON v1.5.0
[ae98c720] Jieko v0.2.1
[63c18a36] KernelAbstractions v0.9.41
[ba0b0d4f] Krylov v0.10.6
[b964fa9f] LaTeXStrings v1.4.0
[23fbe1c1] Latexify v0.16.10
[10f19ff3] LayoutPointers v0.1.17
[0e77f7df] LazilyInitializedFields v1.3.0
[87fe0de2] LineSearch v0.1.7
[d3d80556] LineSearches v7.6.0
[5c8ed15e] LinearOperators v2.13.0
[7ed4a6bd] LinearSolve v3.73.0
[2ab3a3ac] LogExpFunctions v0.3.29
[e6f89c97] LoggingExtras v1.2.0
[6a3a0e7e] LossControl v0.4.0 `~/work/LossControl.jl/LossControl.jl`
[d8e11817] MLStyle v0.4.17
[1914dd2f] MacroTools v0.5.16
[d125e4d3] ManualMemory v0.1.8
[d0879d2d] MarkdownAST v0.1.3
[bb5d69b7] MaybeInplace v0.1.4
[739be429] MbedTLS v1.1.10
[442fdcdd] Measures v0.3.3
[e1d29d7a] Missings v1.2.0
[2e0e35c7] Moshi v0.3.7
[46d2c3a1] MuladdMacro v0.2.4
[a4795742] NLPModels v0.21.12
[f4238b75] NLPModelsIpopt v0.11.3
[e01155f1] NLPModelsModifiers v0.8.0
[d41bc354] NLSolversBase v8.0.0
[77ba4419] NaNMath v1.1.3
[8913a72c] NonlinearSolve v4.17.1
[be0214bd] NonlinearSolveBase v2.24.0
[5959db7a] NonlinearSolveFirstOrder v2.1.1
[9a2c21bd] NonlinearSolveQuasiNewton v1.13.1
[26075421] NonlinearSolveSpectralMethods v1.7.1
[4d8831e6] OpenSSL v1.6.1
[5f98b655] OptimalControl v2.0.0
[bac558e1] OrderedCollections v1.8.1
[1dea7af3] OrdinaryDiffEq v6.111.0
[89bda076] OrdinaryDiffEqAdamsBashforthMoulton v1.11.0
[6ad6398a] OrdinaryDiffEqBDF v1.25.0
[bbf590c4] OrdinaryDiffEqCore v3.30.0
[50262376] OrdinaryDiffEqDefault v1.14.0
[4302a76b] OrdinaryDiffEqDifferentiation v2.8.0
[9286f039] OrdinaryDiffEqExplicitRK v1.12.0
[e0540318] OrdinaryDiffEqExponentialRK v1.15.0
[becaefa8] OrdinaryDiffEqExtrapolation v1.18.0
[5960d6e9] OrdinaryDiffEqFIRK v1.26.0
[101fe9f7] OrdinaryDiffEqFeagin v1.10.0
[d3585ca7] OrdinaryDiffEqFunctionMap v1.11.0
[d28bc4f8] OrdinaryDiffEqHighOrderRK v1.12.0
[9f002381] OrdinaryDiffEqIMEXMultistep v1.14.0
[521117fe] OrdinaryDiffEqLinear v1.12.0
[1344f307] OrdinaryDiffEqLowOrderRK v1.13.0
[b0944070] OrdinaryDiffEqLowStorageRK v1.15.0
[127b3ac7] OrdinaryDiffEqNonlinearSolve v1.27.0
[c9986a66] OrdinaryDiffEqNordsieck v1.11.0
[5dd0a6cf] OrdinaryDiffEqPDIRK v1.14.0
[5b33eab2] OrdinaryDiffEqPRK v1.10.0
[04162be5] OrdinaryDiffEqQPRK v1.10.0
[af6ede74] OrdinaryDiffEqRKN v1.12.0
[43230ef6] OrdinaryDiffEqRosenbrock v1.30.0
[2d112036] OrdinaryDiffEqSDIRK v1.14.0
[669c94d9] OrdinaryDiffEqSSPRK v1.14.0
[e3e12d00] OrdinaryDiffEqStabilizedIRK v1.14.0
[358294b1] OrdinaryDiffEqStabilizedRK v1.10.0
[fa646aed] OrdinaryDiffEqSymplecticRK v1.13.0
[b1df2697] OrdinaryDiffEqTsit5 v1.12.0
[79d7bb75] OrdinaryDiffEqVerner v1.14.0
[d96e819e] Parameters v0.12.3
[69de0a69] Parsers v2.8.3
[ccf2f8ad] PlotThemes v3.3.0
[995b91a9] PlotUtils v1.4.4
[91a5bcdd] Plots v1.41.6
[f517fe37] Polyester v0.7.19
[1d0040c9] PolyesterWeave v0.2.2
[d236fae5] PreallocationTools v1.2.0
[aea7be01] PrecompileTools v1.3.3
[21216c6a] Preferences v1.5.2
[43287f4e] PtrArrays v1.4.0
[3cdcf5f2] RecipesBase v1.3.4
[01d81517] RecipesPipeline v0.6.12
⌅ [731186ca] RecursiveArrayTools v3.54.0
[189a3867] Reexport v1.2.2
[2792f1a3] RegistryInstances v0.1.0
[05181044] RelocatableFolders v1.0.1
[ae029012] Requires v1.3.1
[37e2e3b7] ReverseDiff v1.16.2
[7e49a35a] RuntimeGeneratedFunctions v0.5.18
[94e857df] SIMDTypes v0.1.0
⌅ [0bca4576] SciMLBase v2.155.0
[19f34311] SciMLJacobianOperators v0.1.13
[a6db7da4] SciMLLogging v1.9.1
[c0aeaf25] SciMLOperators v1.16.0
[431bcebd] SciMLPublic v1.0.1
[53ae85a6] SciMLStructures v1.10.0
[6c6a2e73] Scratch v1.3.0
[efcf1570] Setfield v1.1.2
[992d4aef] Showoff v1.0.3
[777ac1f9] SimpleBufferStream v1.2.0
[727e6d20] SimpleNonlinearSolve v2.11.1
[ff4d7338] SolverCore v0.3.10
[a2af1166] SortingAlgorithms v1.2.2
[9f842d2f] SparseConnectivityTracer v1.2.1
[0a514795] SparseMatrixColorings v0.4.26
[276daf66] SpecialFunctions v2.7.2
[860ef19b] StableRNGs v1.0.4
[aedffcd0] Static v1.3.1
[0d7ed370] StaticArrayInterface v1.9.0
[90137ffa] StaticArrays v1.9.18
[1e83bf80] StaticArraysCore v1.4.4
[10745b16] Statistics v1.11.1
[82ae8749] StatsAPI v1.8.0
[2913bbd2] StatsBase v0.34.10
[7792a7ef] StrideArraysCore v0.5.8
[ec057cc2] StructUtils v2.7.1
[2efcf032] SymbolicIndexingInterface v0.3.46
[62fd8b95] TensorCore v0.1.1
[8290d209] ThreadingUtilities v0.5.5
[a759f4b9] TimerOutputs v0.5.29
[3bb67fe8] TranscodingStreams v0.11.3
[781d530d] TruncatedStacktraces v1.4.0
[5c2747f8] URIs v1.6.1
[3a884ed6] UnPack v1.0.2
[1cfade01] UnicodeFun v0.4.1
[013be700] UnsafeAtomics v0.3.1
[41fe7b60] Unzip v0.2.0
[ae81ac8f] ASL_jll v0.1.3+0
[6e34b625] Bzip2_jll v1.0.9+0
[83423d85] Cairo_jll v1.18.6+0
[ee1fde0b] Dbus_jll v1.16.2+0
[2702e6a9] EpollShim_jll v0.0.20230411+1
[2e619515] Expat_jll v2.7.3+0
[b22a6f82] FFMPEG_jll v8.0.1+1
[a3f928ae] Fontconfig_jll v2.17.1+0
[d7e528f0] FreeType2_jll v2.14.3+1
[559328eb] FriBidi_jll v1.0.17+0
[0656b61e] GLFW_jll v3.4.1+1
[d2c73de3] GR_jll v0.73.24+0
⌅ [b0724c58] GettextRuntime_jll v0.22.4+0
[61579ee1] Ghostscript_jll v9.55.1+0
[020c3dae] Git_LFS_jll v3.7.0+0
[f8c6e375] Git_jll v2.53.0+0
[7746bdde] Glib_jll v2.86.3+0
[3b182d85] Graphite2_jll v1.3.15+0
[2e76f6c2] HarfBuzz_jll v8.5.1+0
[e33a78d0] Hwloc_jll v2.13.0+1
[1d5cc7b8] IntelOpenMP_jll v2025.2.0+0
[9cc047cb] Ipopt_jll v300.1400.1901+0
[aacddb02] JpegTurbo_jll v3.1.5+0
[c1c5ebd0] LAME_jll v3.100.3+0
[88015f11] LERC_jll v4.1.0+0
[1d63c593] LLVMOpenMP_jll v18.1.8+0
⌅ [e9f186c6] Libffi_jll v3.4.7+0
[7e76a0d4] Libglvnd_jll v1.7.1+1
[94ce4f54] Libiconv_jll v1.18.0+0
[4b2f31a3] Libmount_jll v2.42.0+0
[89763e89] Libtiff_jll v4.7.2+0
[38a345b3] Libuuid_jll v2.42.0+0
[d00139f3] METIS_jll v5.1.3+0
[856f044c] MKL_jll v2025.2.0+0
[d7ed1dd3] MUMPS_seq_jll v500.800.200+0
[c8ffd9c3] MbedTLS_jll v2.28.1010+0
[e7412a2a] Ogg_jll v1.3.6+0
[656ef2d0] OpenBLAS32_jll v0.3.30+0
[9bd350c2] OpenSSH_jll v10.3.1+0
[efe28fd5] OpenSpecFun_jll v0.5.6+0
[91d4177d] Opus_jll v1.6.1+0
[36c8627f] Pango_jll v1.57.0+0
⌅ [30392449] Pixman_jll v0.44.2+0
[c0090381] Qt6Base_jll v6.10.2+1
[629bc702] Qt6Declarative_jll v6.10.2+1
[ce943373] Qt6ShaderTools_jll v6.10.2+1
[6de9746b] Qt6Svg_jll v6.10.2+0
[e99dba38] Qt6Wayland_jll v6.10.2+1
[319450e9] SPRAL_jll v2025.9.18+0
[a44049a8] Vulkan_Loader_jll v1.3.243+0
[a2964d1f] Wayland_jll v1.24.0+0
⌅ [02c8fc9c] XML2_jll v2.13.9+0
[ffd25f8a] XZ_jll v5.8.3+0
[f67eecfb] Xorg_libICE_jll v1.1.2+0
[c834827a] Xorg_libSM_jll v1.2.6+0
[4f6342f7] Xorg_libX11_jll v1.8.13+0
[0c0b7dd1] Xorg_libXau_jll v1.0.13+0
[935fb764] Xorg_libXcursor_jll v1.2.4+0
[a3789734] Xorg_libXdmcp_jll v1.1.6+0
[1082639a] Xorg_libXext_jll v1.3.8+0
[d091e8ba] Xorg_libXfixes_jll v6.0.2+0
[a51aa0fd] Xorg_libXi_jll v1.8.3+0
[d1454406] Xorg_libXinerama_jll v1.1.7+0
[ec84b674] Xorg_libXrandr_jll v1.5.6+0
[ea2f1a96] Xorg_libXrender_jll v0.9.12+0
[a65dc6b1] Xorg_libpciaccess_jll v0.18.1+0
[c7cfdc94] Xorg_libxcb_jll v1.17.1+0
[cc61e674] Xorg_libxkbfile_jll v1.2.0+0
[e920d4aa] Xorg_xcb_util_cursor_jll v0.1.6+0
[12413925] Xorg_xcb_util_image_jll v0.4.1+0
[2def613f] Xorg_xcb_util_jll v0.4.1+0
[975044d2] Xorg_xcb_util_keysyms_jll v0.4.1+0
[0d47668e] Xorg_xcb_util_renderutil_jll v0.3.10+0
[c22f9ab0] Xorg_xcb_util_wm_jll v0.4.2+0
[35661453] Xorg_xkbcomp_jll v1.4.7+0
[33bec58e] Xorg_xkeyboard_config_jll v2.44.0+0
[c5fb5394] Xorg_xtrans_jll v1.6.0+0
[3161d3a3] Zstd_jll v1.5.7+1
[35ca27e7] eudev_jll v3.2.14+0
[214eeab7] fzf_jll v0.61.1+0
[a4ae2306] libaom_jll v3.13.1+0
[0ac62f75] libass_jll v0.17.4+0
[1183f4f0] libdecor_jll v0.2.2+0
[8e53e030] libdrm_jll v2.4.125+1
[2db6ffa8] libevdev_jll v1.13.4+0
[f638f0a6] libfdk_aac_jll v2.0.4+0
[36db933b] libinput_jll v1.28.1+0
[b53b4c65] libpng_jll v1.6.57+0
[9a156e7d] libva_jll v2.23.0+0
[f27f6e37] libvorbis_jll v1.3.8+0
[009596ad] mtdev_jll v1.1.7+0
[1317d2d5] oneTBB_jll v2022.0.0+1
⌅ [1270edf5] x264_jll v10164.0.1+0
[dfaa095f] x265_jll v4.1.0+0
[d8fb68d0] xkbcommon_jll v1.13.0+0
[0dad84c5] ArgTools v1.1.2
[56f22d72] Artifacts v1.11.0
[2a0f44e3] Base64 v1.11.0
[ade2ca70] Dates v1.11.0
[8ba89e20] Distributed v1.11.0
[f43a241f] Downloads v1.7.0
[7b1f6079] FileWatching v1.11.0
[9fa8497b] Future v1.11.0
[b77e0a4c] InteractiveUtils v1.11.0
[ac6e5ff7] JuliaSyntaxHighlighting v1.12.0
[4af54fe1] LazyArtifacts v1.11.0
[b27032c2] LibCURL v0.6.4
[76f85450] LibGit2 v1.11.0
[8f399da3] Libdl v1.11.0
[37e2e46d] LinearAlgebra v1.12.0
[56ddb016] Logging v1.11.0
[d6f4376e] Markdown v1.11.0
[a63ad114] Mmap v1.11.0
[ca575930] NetworkOptions v1.3.0
[44cfe95a] Pkg v1.12.1
[de0858da] Printf v1.11.0
[3fa0cd96] REPL v1.11.0
[9a3f8284] Random v1.11.0
[ea8e919c] SHA v0.7.0
[9e88b42a] Serialization v1.11.0
[6462fe0b] Sockets v1.11.0
[2f01184e] SparseArrays v1.12.0
[f489334b] StyledStrings v1.11.0
[fa267f1f] TOML v1.0.3
[a4e569a6] Tar v1.10.0
[8dfed614] Test v1.11.0
[cf7118a7] UUIDs v1.11.0
[4ec0a83e] Unicode v1.11.0
[e66e0078] CompilerSupportLibraries_jll v1.3.0+1
[deac9b47] LibCURL_jll v8.15.0+0
[e37daf67] LibGit2_jll v1.9.0+0
[29816b5a] LibSSH2_jll v1.11.3+1
[14a3606d] MozillaCACerts_jll v2025.11.4
[4536629a] OpenBLAS_jll v0.3.29+0
[05823500] OpenLibm_jll v0.8.7+0
[458c3c95] OpenSSL_jll v3.5.4+0
[efcefdf7] PCRE2_jll v10.44.0+1
[bea87d4a] SuiteSparse_jll v7.8.3+2
[83775a58] Zlib_jll v1.3.1+2
[8e850b90] libblastrampoline_jll v5.15.0+0
[8e850ede] nghttp2_jll v1.64.0+1
[3f19e933] p7zip_jll v17.7.0+0
Info Packages marked with ⌅ have new versions available but compatibility constraints restrict them from upgrading. To see why use `status --outdated -m`- 1L. S. Pontryagin, V. G. Boltyanskii, R. V. Gamkrelidze, E. F. Mishchenko, The Mathematical Theory of Optimal Processes, A Pergamon Press Book. The Macmillan Co., New York, 1964.
- 2T. Bayen, A. Bouali, L. Bourdin & O. Cots, Loss control regions in optimal control problems, Journal of Differential Equations, 405 (2024), 359-397.
- 3P. Bettiol, L. Bourdin, Pontryagin Maximum Principle for State Constrained Optimal Sampled-Data Control Problems on Time Scales, ESAIM Control Optim. Calc. Var., 27 (2021) 51.
- 4L. Bourdin, G. Dhar, Optimal Sampled-Data Controls with Running Inequality State Constraints: Pontryagin Maximum Principle and Bouncing Trajectory Phenomenon, Mathematical Programming, 191 (2022) 907–951.
- 5T. Haberkorn, E. Trélat, Convergence Results for Smooth Regularizations of Hybrid Nonlinear Optimal Control Problems, SIAM Journal on Control and Optimization, 49 (2011) 1498–1522.