Numerical developments to solve optimal control problems in Julia
Jean-Baptiste Caillau, Olivier Cots, Joseph Gergaud, Pierre Martinon, Sophia Sed

What it's about
- Nonlinear optimal control of ODEs:
\[g(x(t_0),x(t_f)) + \int_{t_0}^{t_f} f^0(x(t), u(t))\, \mathrm{d}t \to \min\]
subject to
\[\dot{x}(t) = f(x(t), u(t)),\quad t \in [t_0, t_f]\]
plus boundary, control and state constraints
- Our core interests: numerical & geometrical methods in control, applications
- Why Julia: fast (+ JIT), strongly typed, high-level (AD, macros), fast optimisation and ODE solvers available, rapidly growing community
What is important to solve such a problem numerically?
Syntax matters
Do more...
rewrite in OptimalControl.jl DSL the free time problem below as a problem with fixed final time using:
- a change time from t to s = t / tf
- tf as an additional state variable subject to dtf / ds = 0
ocp = @def begin
tf ∈ R, variable
t ∈ [0, tf], time
x = (q, v) ∈ R², state
u ∈ R, control
-1 ≤ u(t) ≤ 1
q(0) == -1
v(0) == 0
q(tf) == 0
v(tf) == 0
ẋ(t) == [v(t), u(t)]
tf → min
endocp_fixed = @def begin
# Fixed time domain
s ∈ [0, 1], time
# Augmented state: (position, velocity, final_time)
y = (q, v, tf) ∈ R³, state
# Control
u ∈ R, control
# Transformed dynamics (multiply by tf due to ds = dt/tf)
∂(q)(s) == tf(s) * v(s)
∂(v)(s) == tf(s) * u(s)
∂(tf)(s) == 0
# Initial conditions
q(0) == -1
v(0) == 0
# tf(0) is free (no initial condition needed)
# Final conditions
q(1) == 0
v(1) == 0
# tf(1) is what we minimize
# Control constraints
-1 ≤ u(s) ≤ 1
# Cost: minimize final time
tf(1) → min
endPerformance matters
- Discretising an OCP into an NLP: $h_i := t_{i+1}-t_i$,
\[g(X_0,X_N) + \sum_{i=0}^{N} h_i f^0(X_i,U_i) \to \min\]
subject to
\[X_{i+1} - X_i - h_i f(X_i, U_i) = 0,\quad i = 0,\dots,N-1\]
plus other constraints on $X := (X_i)_{i=0,N}$ and $U := (U_i)_{i=0,N}$ such as boundary and path (state and / or control) constraints :
\[b(t_0, X_0, t_N, X_N) = 0\]
\[c(X_i, U_i) \leq 0,\quad i = 0,\dots,N\]
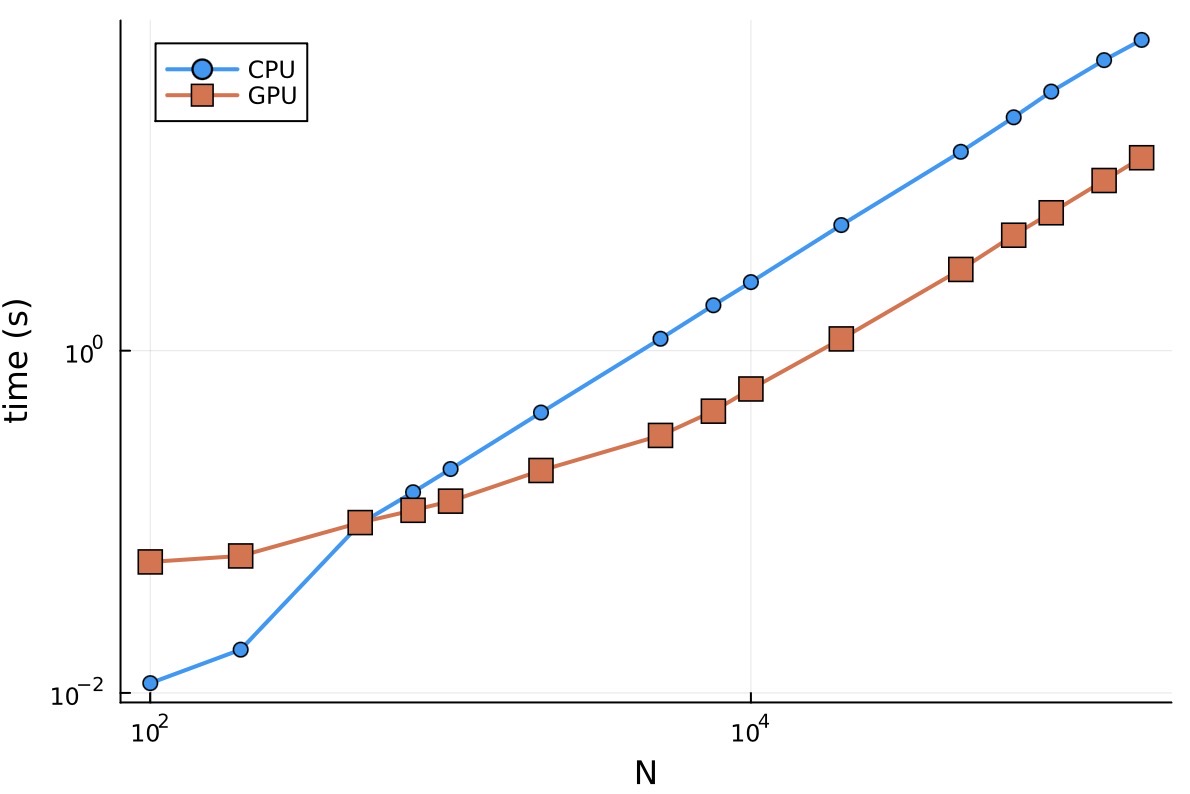
- SIMD parallelism ($f_0$, $f$, $g$) + sparsity: Kernels for GPU (KernelAbstraction.jl) and sparse linear algebra (CUDSS.jl)
- Modelling and optimising for GPU: ExaModels.jl + MadNLP.jl, with built-in AD
- Compile into an ExaModel (one pass compiler, syntax + semantics)
Solving (MadNLP + CUDSS)
This is MadNLP version v0.8.7, running with cuDSS v0.4.0
Number of nonzeros in constraint Jacobian............: 12005
Number of nonzeros in Lagrangian Hessian.............: 9000
Total number of variables............................: 4004
variables with only lower bounds: 0
variables with lower and upper bounds: 0
variables with only upper bounds: 0
Total number of equality constraints.................: 3005
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 1.0000000e-01 1.10e+00 1.00e+00 -1.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 1.0001760e-01 1.10e+00 3.84e-03 -1.0 6.88e+02 -4.0 1.00e+00 2.00e-07h 2
2 -5.2365072e-03 1.89e-02 1.79e-07 -1.0 6.16e+00 -4.5 1.00e+00 1.00e+00h 1
3 5.9939621e+00 2.28e-03 1.66e-04 -3.8 6.00e+00 -5.0 9.99e-01 1.00e+00h 1
4 5.9996210e+00 2.94e-06 8.38e-07 -3.8 7.70e-02 - 1.00e+00 1.00e+00h 1
Number of Iterations....: 4
(scaled) (unscaled)
Objective...............: 5.9996210189633494e+00 5.9996210189633494e+00
Dual infeasibility......: 8.3756005011360529e-07 8.3756005011360529e-07
Constraint violation....: 2.9426923277963834e-06 2.9426923277963834e-06
Complementarity.........: 2.0007459547789288e-06 2.0007459547789288e-06
Overall NLP error.......: 2.9426923277963834e-06 2.9426923277963834e-06
Number of objective function evaluations = 6
Number of objective gradient evaluations = 5
Number of constraint evaluations = 6
Number of constraint Jacobian evaluations = 5
Number of Lagrangian Hessian evaluations = 4
Total wall-clock secs in solver (w/o fun. eval./lin. alg.) = 0.072
Total wall-clock secs in linear solver = 0.008
Total wall-clock secs in NLP function evaluations = 0.003
Total wall-clock secs = 0.083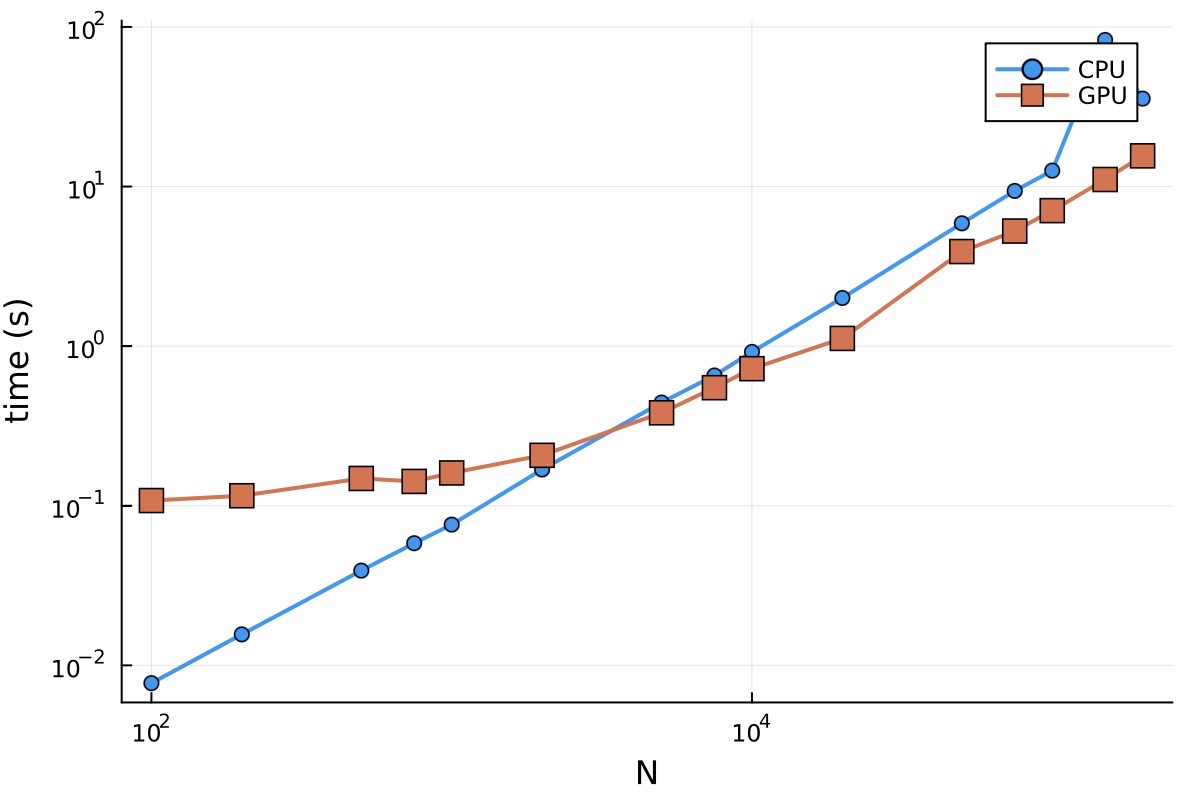
- Quadrotor, H100 run
Maths matters
- Coupling direct and indirect (aka shooting methods)
- Easy access to differential-geometric tools with AD
- Goddard tutorial
Applications matter
- Use case approach: aerospace engineering, quantum mechanics, biology, environment...
- Magnetic Resonance Imaging
Wrap up
- High level modelling of optimal control problems
- High performance solving both on CPU and GPU
- Driven by applications
control-toolbox.org
- Collection of Julia Packages rooted at OptimalControl.jl

- Open to contributions! Give it a try, give it a star ⭐️
- Collection of problems: OptimalControlProblems.jl

Credits (not exhaustive!)
- ADNLPModels.jl
- DifferentiationInterface.jl
- DifferentialEquations.jl
- ExaModels.jl
- Ipopt.jl
- MadNLP.jl
- MLStyle.jl
Acknowledgements
Jean-Baptiste Caillau is partially funded by a France 2030 support managed by the Agence Nationale de la Recherche, under the reference ANR-23-PEIA-0004 (PDE-AI project).
