Saturation problem in Magnetic Resonance Imaging
Time-minimal saturation problem
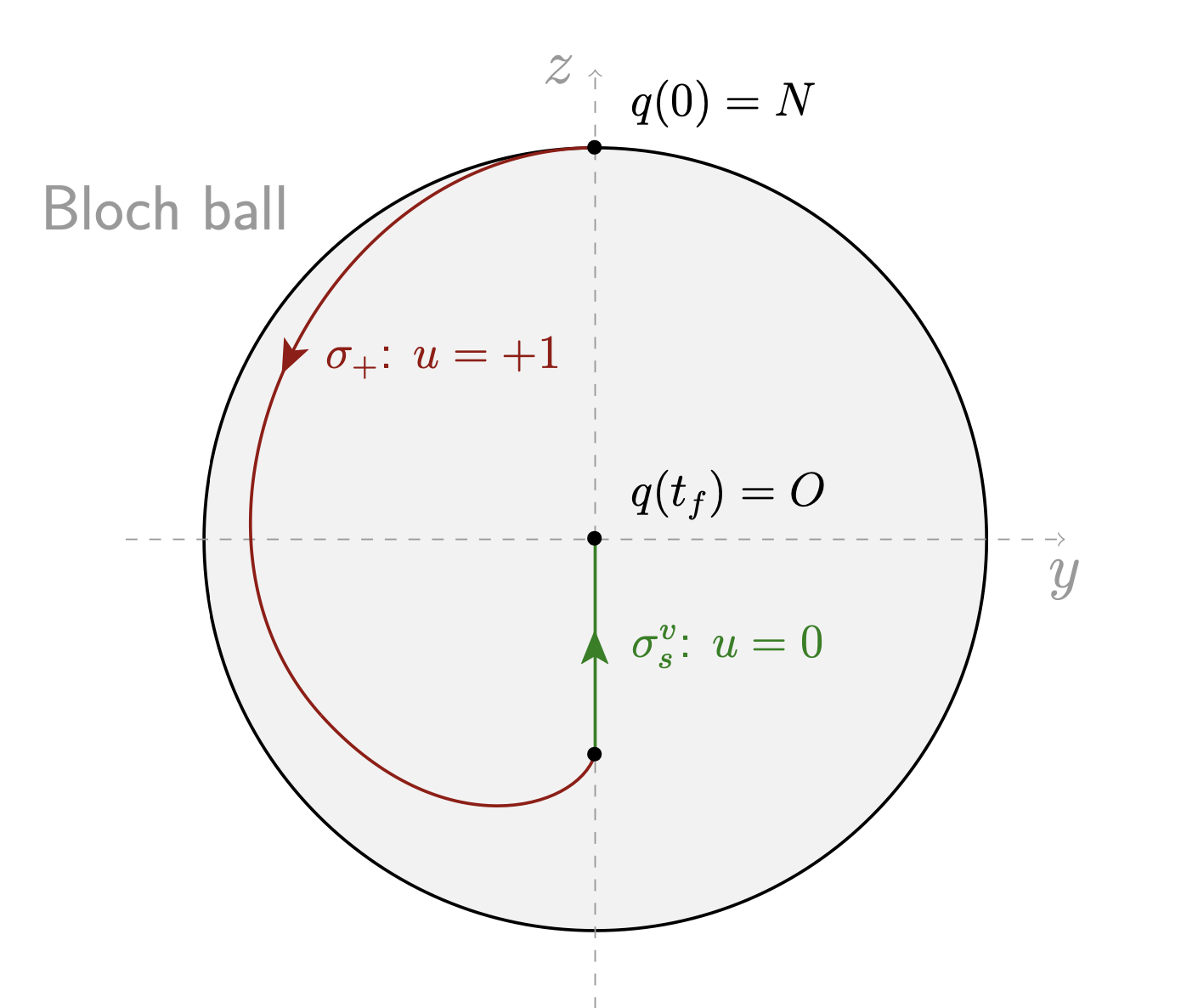
The time-minimal saturation problem is the following: starting from the North pole of the Bloch ball, the goal is to reach in minimum time the center of the Bloch ball, which corresponds at the final time to zero magnetization of the spin.
We define the time-minimal saturation problem as the following optimal control problem:
\[ \inf t_f, \quad \text{s.t.} \quad u(\cdot) \in \mathcal{U}, \quad t_f \ge 0 \quad \text{and} \quad q(t_f, N, u(\cdot)) = O,\]
where $N = (0, 1)$ is the North pole, where $O = (0,0)$ is the origin of the Bloch ball and where $t \mapsto q(t, q_0, u(\cdot))$ is the unique maximal solution of the 2D control system $\dot{q} = F_0(q) + u\, F_1(q)$ associated to the control $u(\cdot)$ and starting from the given initial condition $q_0$.
The inversion sequence ${\sigma_+} {\sigma_s^v}$, that is a positive bang arc followed by a singular vertical arc with zero control, is the simplest way to go from $N$ to $O$. Is it optimal?
We have the following symmetry.
Proposition. Let $(y(\cdot), z(\cdot))$, with associated control $u(\cdot)$, be a trajectory solution of $\dot{q} = F_0(q) + u\, F_1(q)$. Then, $(-y(\cdot), z(\cdot))$ with control $-u(\cdot)$ is also solution of this system.
This discrete symmetry allows us to consider only trajectories inside the domain $\{y \le 0\}$ of the Bloch ball.
In order to solve numerically the problem, we need to set the parameters. We introduce the practical cases in the following table. We give the relaxation times with the associated $(\gamma, \Gamma)$ parameters for $\omega_\mathrm{max} = 2 \pi\times 32.3$ Hz. Note that in the experiments, $\omega_\mathrm{max}$ may be chosen up to 15 000 Hz but we consider the same value as in [1].
| Name | $T_1$ | $T_2$ | $\gamma$ | $\Gamma$ | $\delta=\gamma-\Gamma$ |
|---|---|---|---|---|---|
| Water | 2.5 | 2.5 | $1.9710e^{-03}$ | $1.9710e^{-03}$ | $0.0$ |
| Cerebrospinal Fluid | 2.0 | 0.3 | $2.4637e^{-03}$ | $1.6425e^{-02}$ | $-1.3961^{-02}$ |
| Deoxygenated blood | 1.35 | 0.05 | $3.6499e^{-03}$ | $9.8548e^{-02}$ | $-9.4898^{-02}$ |
| Oxygenated blood | 1.35 | 0.2 | $3.6499e^{-03}$ | $2.4637e^{-02}$ | $-2.0987^{-02}$ |
| Gray cerebral matter | 0.92 | 0.1 | $5.3559e^{-03}$ | $4.9274e^{-02}$ | $-4.3918^{-02}$ |
| White cerebral matter | 0.78 | 0.09 | $6.3172e^{-03}$ | $5.4749e^{-02}$ | $-4.8432^{-02}$ |
| Fat | 0.2 | 0.1 | $2.4637e^{-02}$ | $4.9274e^{-02}$ | $-2.4637^{-02}$ |
| Brain | 1.062 | 0.052 | $4.6397e^{-03}$ | $9.4758e^{-02}$ | $-9.0118^{-02}$ |
| Parietal muscle | 1.2 | 0.029 | $4.1062e^{-03}$ | $1.6991e^{-01}$ | $-1.6580^{-02}$ |
Table: Matter name with associated relaxation times in seconds and relative $(\gamma, \Gamma)$ parameters with $\omega_\mathrm{max} = 2 \pi\times 32.3$ Hz and $u_\mathrm{max} = 1$.
We consider the Deoxygenated blood case. According to Theorem 3.6 from [2] the optimal solution is of the form Bang-Singular-Bang-Singular (BSBS). The two bang arcs are with control $u=1$. The first singular arc is contained in the horizontal line $z=\gamma/2\delta$ while the second singular arc is contained in the vertical line $y=0$. We propose in the following to retrieve this result numerically.
Let us first define the parameters with the two vector fields $F_0$ and $F_1$.
import OptimalControl: ⋅
⋅(a::Number, b::Number) = a*b
# Blood case
T1 = 1.35 # s
T2 = 0.05
ω = 2π⋅32.3 # Hz
γ = 1/(ω⋅T1)
Γ = 1/(ω⋅T2)
δ = γ - Γ
zs = γ / 2δ # ordinate of the horizontal singular line
F0(y, z) = [-Γ⋅y, γ⋅(1-z)]
F1(y, z) = [-z, y]
q0 = [0, 1] # initial state: the North poleThen, we can define the problem with OptimalControl.
using OptimalControl
ocp = @def begin
tf ∈ R, variable
t ∈ [0, tf ], time
q = (y, z) ∈ R², state
u ∈ R, control
y(t) ≤ 0.1 # for the symmetry
q(0) == q0
q(tf) == [0, 0]
-1 ≤ u(t) ≤ 1
q̇(t) == F0(q(t)...) + u(t) * F1(q(t)...)
tf → min
tf ≥ 0
endDirect method
We start to solve the problem with a direct method. The problem is transcribed into a NLP optimization problem by OptimalControl. The NLP problem is then solved by the well-known solver Ipopt thanks to NLPModelsIpopt.
We first start with a coarse grid, with only 100 points. We provide an init consistent with a solution in the domain $y \le 0$.
using NLPModelsIpopt
N = 100
sol = solve(
ocp;
grid_size=N,
init=(state=[-0.5, 0.0], ),
scheme=:gauss_legendre_2,
print_level=4
)▫ This is OptimalControl 2.0.0, solving with: collocation → adnlp → ipopt (cpu)
📦 Configuration:
├─ Discretizer: collocation (grid_size = 100, scheme = gauss_legendre_2)
├─ Modeler: adnlp
└─ Solver: ipopt (print_level = 4)
▫ Total number of variables............................: 703
variables with only lower bounds: 1
variables with lower and upper bounds: 100
variables with only upper bounds: 101
Total number of equality constraints.................: 604
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
Number of Iterations....: 94
(scaled) (unscaled)
Objective...............: 4.2714529345077779e+01 4.2714529345077779e+01
Dual infeasibility......: 8.7396756498492323e-13 8.7396756498492323e-13
Constraint violation....: 1.8041124150158794e-16 1.8041124150158794e-16
Variable bound violation: 9.9751837900896589e-09 9.9751837900896589e-09
Complementarity.........: 1.0000895798715887e-11 1.0000895798715887e-11
Overall NLP error.......: 1.0000895798715887e-11 1.0000895798715887e-11
Number of objective function evaluations = 98
Number of objective gradient evaluations = 95
Number of equality constraint evaluations = 98
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 95
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 94
Total seconds in IPOPT = 7.928
EXIT: Optimal Solution Found.Then, we plot the solution thanks to Plots.
using Plots
plt = plot(sol; size=(700, 500), label="N = "*string(N))
This rough approximation is then refine on a finer grid of 1000 points. This two steps resolution increases the speed of convergence. Note that we provide the previous solution as initialisation.
N = 1000
direct_sol = solve(
ocp;
grid_size=N,
init=sol,
scheme=:gauss_legendre_2,
print_level=4,
tol=1e-12
)▫ This is OptimalControl 2.0.0, solving with: collocation → adnlp → ipopt (cpu)
📦 Configuration:
├─ Discretizer: collocation (grid_size = 1000, scheme = gauss_legendre_2)
├─ Modeler: adnlp
└─ Solver: ipopt (print_level = 4, tol = 1.0e-12)
▫ Total number of variables............................: 7003
variables with only lower bounds: 1
variables with lower and upper bounds: 1000
variables with only upper bounds: 1001
Total number of equality constraints.................: 6004
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
Number of Iterations....: 43
(scaled) (unscaled)
Objective...............: 4.2713711084173731e+01 4.2713711084173731e+01
Dual infeasibility......: 4.4660455889022899e-13 4.4660455889022899e-13
Constraint violation....: 1.3569874390828573e-15 1.3569874390828573e-15
Variable bound violation: 9.9883199489170238e-09 9.9883199489170238e-09
Complementarity.........: 5.0000406364691309e-13 5.0000406364691309e-13
Overall NLP error.......: 5.0000406364691309e-13 5.0000406364691309e-13
Number of objective function evaluations = 47
Number of objective gradient evaluations = 44
Number of equality constraint evaluations = 47
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 44
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 43
Total seconds in IPOPT = 2.862
EXIT: Optimal Solution Found.We can compare both solutions. The BSBS structure is revealed even if the second bang arc is not clearly demonstrated.
plot!(plt, direct_sol; label="N = "*string(N), color=2)
We define a custom plot function for plotting the solution inside the Bloch ball.
Click to unfold and get the code of the custom plot function.
using Plots.PlotMeasures
function spin_plot(sol; kwargs...)
y2 = cos(asin(zs))
y1 = -y2
t = time_grid(sol)
q = state(sol)
y = t -> q(t)[1]
z = t -> q(t)[2]
u = control(sol)
# styles
Bloch_ball_style = (seriestype=[:shape, ], color=:grey, linecolor=:black,
legend=false, fillalpha=0.1, aspect_ratio=1)
state_style = (label=:none, linewidth=2, color=1)
initial_point_style = (seriestype=:scatter, color=:1, linewidth=0)
axis_style = (color=:black, linewidth=0.5)
control_style = (label=:none, linewidth=2, color=1)
# state trajectory in the Bloch ball
θ = LinRange(0, 2π, 100)
state_plt = plot(cos.(θ), sin.(θ); Bloch_ball_style...) # Bloch ball
plot!(state_plt, [-1, 1], [ 0, 0]; axis_style...) # horizontal axis
plot!(state_plt, [ 0, 0], [-1, 1]; axis_style...) # vertical axis
plot!(state_plt, [y1, y2], [zs, zs]; linestyle=:dash, axis_style...) # singular line
plot!(state_plt, y.(t), z.(t); state_style...)
plot!(state_plt, [0], [1]; initial_point_style...)
plot!(state_plt; xlims=(-1.1, 0.1), ylims=(-0.1, 1.1), xlabel="y", ylabel="z")
# control
control_plt = plot(legend=false)
plot!(control_plt, [ 0, t[end]], [1, 1]; linestyle=:dash, axis_style...) # upper bound
plot!(control_plt, [ 0, t[end]], [0, 0]; linestyle=:dash, axis_style...)
plot!(control_plt, [ 0, 0], [-0.1, 1.1]; axis_style...)
plot!(control_plt, [ t[end], t[end]], [-0.1, 1.1]; axis_style...)
plot!(control_plt, t, u.(t); control_style...)
plot!(control_plt; ylims=(-0.1, 1.1), xlabel="t", ylabel="u")
return plot(state_plt, control_plt; layout=(1, 2), leftmargin=15px, bottommargin=15px, kwargs...)
endBelow, we plot the solution inside the Bloch ball. The first bang arc drives the trajectory to the horizontal singular line $z = \gamma / (2\delta)$, shown as a dashed line. The second bang arc is very short, which makes it difficult to capture accurately unless the grid is sufficiently fine. In the next section, we introduce an indirect method to refine this approximation.
spin_plot(direct_sol; size=(800, 400))
To make the indirect method converge we need a good initial guess. We extract below the useful information from the direct solution to provide an initial guess for the indirect method. We need the initial costate together with the switching times between bang and singular arcs and the final time.
t = time_grid(direct_sol)
q = state(direct_sol)
p = costate(direct_sol)
u = control(direct_sol)
tf = variable(direct_sol)
t0 = 0
pz0 = p(t0)[2]
t_bang_1 = t[ (abs.(u.(t)) .≥ 0.5) .& (t .≤ 5)]
t_bang_2 = t[ (abs.(u.(t)) .≥ 0.5) .& (t .≥ 35)]
t1 = max(t_bang_1...)
t2 = min(t_bang_2...)
t3 = max(t_bang_2...)
q1, p1 = q(t1), p(t1)
q2, p2 = q(t2), p(t2)
q3, p3 = q(t3), p(t3)
println("pz0 = ", pz0)
println("t1 = ", t1)
println("t2 = ", t2)
println("t3 = ", t3)
println("tf = ", tf)pz0 = -10.138145104720296
t1 = 1.6231210211986018
t2 = 37.11821493214697
t3 = 37.54535204298871
tf = 42.71371108417373Indirect method
We introduce the pseudo-Hamiltonian
\[H(q, p, u) = H_0(q, p) + u\, H_1(q, p)\]
where $H_0(q, p) = p \cdot F_0(q)$ and $H_1(q, p) = p \cdot F_1(q)$ are both Hamiltonian lifts. According to the maximisation condition from the Pontryagin Maximum Principle (PMP), a bang arc occurs when $H_1$ is nonzero and of constant sign along the arc. On the contrary the singular arcs are contained in $H_1 = 0$. If $t \mapsto H_1(q(t), p(t)) = 0$ along an arc then its derivative is also zero. Thus, along a singular arc we have also
\[\frac{\mathrm{d}}{\mathrm{d}t} H_1(q(t), p(t)) = \{H_0, H_1\}(q(t), p(t)) = 0,\]
where $\{H_0, H_1\}$ is the Poisson bracket of $H_0$ and $H_1$.
Let $F_0$, $F_1$ be two smooth vector fields on a smooth manifold $M$ and $f$ a smooth function on $M$. Let $x$ be local coordinates. The Lie bracket of $F_0$ and $F_1$ is given by
\[ [F_0,F_1] \coloneqq F_0 \cdot F_1 - F_1 \cdot F_0,\]
with $(F_0 \cdot F_1)(x) = \mathrm{d} F_1(x) \cdot F_0(x)$. The Lie derivative $\mathcal{L}_{F_0} f$ of $f$ along $F_0$ is simply written $F_0\cdot f$. Denoting $H_0$, $H_1$ the Hamiltonian lifts of $F_0$, $F_1$, then the Poisson bracket of $H_0$ and $H_1$ is
\[ \{H_0,H_1\} \coloneqq \vec{H_0} \cdot H_1.\]
We also use the notation $H_{01}$ (resp. $F_{01}$) to write the bracket $\{H_0,H_1\}$ (resp. $[F_0,F_1]$) and so forth. Besides, since $H_0$, $H_1$ are Hamiltonian lifts, we have $\{H_0,H_1\}= p \cdot [F_0,F_1]$.
We define a function for plotting the switching function $t \mapsto H_1(q(t), p(t))$ and its derivative along the solution computed by the direct method.
Click to unfold and get the code of the function.
function switching_plot(sol, H1, H01; kwargs...)
t = time_grid(sol)
u = control(sol)
q = state(sol)
p = costate(sol)
tf = t[end]
φ(t) = H1(q(t), p(t)) # switching function
dφ(t) = H01(q(t), p(t)) # derivative of the switching function
# styles
axis_style = (color=:black, linewidth=0.5, label=false)
control_style = (label=:none, linewidth=2, color=1)
# switching function
switching_plt = plot()
plot!(switching_plt, [0, tf], [0, 0]; axis_style...)
plot!(switching_plt, t, φ, label="H1(q(t), p(t))", xlabel="t", linewidth=2)
plot!(switching_plt; xlims=(0, tf))
# derivative of the switching function
dswitching_plt = plot()
plot!(dswitching_plt, [0, tf], [0, 0]; axis_style...)
plot!(dswitching_plt, t, dφ, label="H01(q(t), p(t))", xlabel="t", linewidth=2)
plot!(dswitching_plt; xlims=(0, tf))
# control
control_plt = plot(legend=false)
plot!(control_plt, [ 0, t[end]], [1, 1]; linestyle=:dash, axis_style...) # upper bound
plot!(control_plt, [ 0, t[end]], [0, 0]; linestyle=:dash, axis_style...)
plot!(control_plt, [ 0, 0], [-0.1, 1.1]; axis_style...)
plot!(control_plt, [ t[end], t[end]], [-0.1, 1.1]; axis_style...)
plot!(control_plt, t, u.(t); control_style...)
plot!(control_plt; ylims=(-0.1, 1.1), xlabel="t", ylabel="u")
return plot(switching_plt, dswitching_plt, control_plt; layout=(3, 1), kwargs...)
endWe can notice on the plots below that maximisation condition from the PMP is not satisfied. We can see that the switching function becomes negative along the first bang arc but there is no switching from the control plot. Besides, we can see that along the first singular arc, the switching function is not always zero.
H0 = Lift(q -> F0(q...))
H1 = Lift(q -> F1(q...))
H01 = @Lie { H0, H1 }
switching_plot(direct_sol, H1, H01; size=(700, 800))
We aim to compute a better approximation of the solution thanks to indirect shooting. To do so, we need to define the three different flows associated to the three different control laws in feedback form: bang control, singular control along the horizontal line and singular control along the vertical line.
Let us recall that $\delta = \gamma - \Gamma$. Then, for any $q = (y,z)$ we have:
\[ \begin{aligned} F_{01}(q) &= -(\gamma - \delta z) \frac{\partial}{\partial y} + \delta y \frac{\partial}{\partial z}, \\[0.5em] F_{001}(q) &= \left( \gamma\, (\gamma - 2\Gamma) - \delta^2 z\right)\frac{\partial}{ \partial y} + \delta^2 y \frac{\partial}{\partial z}, \\[0.5em] F_{101}(q) &= 2 \delta y \frac{\partial}{\partial y} + (\gamma - 2 \delta z) \frac{\partial}{\partial z}. \end{aligned}\]
Along a singular arc, we have $H_1 = H_{01} = 0$, that is $p \cdot F_1 = p \cdot F_{01} = 0$. Since, $p$ is of dimension 2 and is nonzero, then we have $\det(F_1, F_{01}) = y ( \gamma - 2 \delta z) = 0$. This gives us the two singular lines.
Differentiating $t \mapsto H_1(q(t), p(t)) = 0$ a second time along a singular arc gives
\[ H_{001}(q(t), p(t)) + u(t)\, H_{101}(q(t), p(t)) = 0,\]
that is $p(t)$ is orthogonal to $F_{001}(q(t)) + u(t)\, F_{101}(q(t))$. Hence, the singular control is given by
\[ \det(F_1(q(t)), F_{001}(q(t))) + u(t) \, \det(F_1(q(t)), F_{101}(q(t))) = 0.\]
For $y=0$, $\det(F_1(q), F_{101}(q))$ is zero and thus the singular control is zero. We denote it $u_0 \coloneqq 0$. Along the horizontal singular line, that is for $z=\gamma/2\delta$, the control is given by
\[ u_s(y) \coloneqq \gamma (2\Gamma - \gamma) / (2 \delta y).\]
Note that we could have defined the singular control with the Hamiltonian lifts $H_{001}$ and $H_{101}$. See the Goddard tutorial for an example of such a computation.
using OrdinaryDiffEq
# Controls
u0 = 0 # off control: vertical singular line
u1 = 1 # positive bang control
us(y) = γ⋅(2Γ−γ)/(2δ⋅y) # singular control: horizontal line
# Flows
options = (abstol=1e-14, reltol=1e-10)
f0 = Flow(ocp, (q, p, tf) -> u0 ; options...)
f1 = Flow(ocp, (q, p, tf) -> u1 ; options...)
fs = Flow(ocp, (q, p, tf) -> us(q[1]); options...)With the previous flows, we can define the shooting function considering the sequence given by the direct method: Bang-Singular-Bang-Singular. There are 3 switching times $t_1$, $t_2$ and $t_3$. The final time $t_f$ is unknown such as the initial costate. To reduce the sensitivity of the shooting function we also consider the states and costates at the switching times as unknowns and we add some matching conditions.
Note that the final time is free, hence, in the normal case, $H = -p^0 = 1$ along the solution of the PMP. Considering this condition at the initial time ($H$ is constant since the system is autonomous), we obtain $p_y(0) = -1$. At the entrance of the singular arcs, we must satisfy $H_1 = H_{01} = 0$. For the first singular arc, this leads to the conditions
\[ - p_y(t_1) z_s + p_z(t_1) y(t_1) = z(t_1) - z_s = 0.\]
At the entrance of the second singular arc, we have
\[ p_y(t_3) = y(t_3) = 0.\]
Finally, the solution has to satisfy the final condition $q(t_f) = (y(t_f), z(t_f)) = (0, 0)$. Since, the last singular arc is contained in $y=0$, the condition $y(t_f)=0$ is redundant and so we only need to check that $z(t_f) = 0$.
Altogether, this leads to the following shooting function.
function shoot!(s, pz0, t1, t2, t3, tf, q1, p1, q2, p2, q3, p3)
p0 = [-1, pz0]
q1_, p1_ = f1(t0, q0, p0, t1)
q2_, p2_ = fs(t1, q1, p1, t2)
q3_, p3_ = f1(t2, q2, p2, t3)
qf , pf = f0(t3, q3, p3, tf)
s[1] = - p1[1] ⋅ zs + p1[2] ⋅ q1[1] # H1 = H01 = 0 on the horizontal
s[2] = q1[2] - zs # singular line, z=zs
s[3] = p3[1] # H1 = H01 = 0 on the vertical
s[4] = q3[1] # singular line, y=0
s[5] = qf[2] # z(tf) = 0
# matching conditions
s[ 6: 7] = q1 - q1_
s[ 8: 9] = p1 - p1_
s[10:11] = q2 - q2_
s[12:13] = p2 - p2_
s[14:15] = q3 - q3_
s[16:17] = p3 - p3_
endWe are now in position to solve the shooting equations. Due to the sensitivity of the first singular arc, we need to improve the initial guess obtained from the direct method to make the Newton solver converge. To do so, we set for the initial guess $z(t_1) = z_s$ and $p_z(t_1) = p_y(t_1) z_s / y(t_1)$.
We can see below from the norm of the shooting function that the initial guess is not very accurate.
# we refine the initial guess to make the Newton solver converge
q1[2] = zs
p1[2] = p1[1] ⋅ zs / q1[1]
# Norm of the shooting function at initial guess
using LinearAlgebra: norm
s = similar([pz0], 17)
shoot!(s, pz0, t1, t2, t3, tf, q1, p1, q2, p2, q3, p3)
println("Norm of the shooting function: ‖s‖ = ", norm(s), "\n")Norm of the shooting function: ‖s‖ = 18.361555101622823We can use the MINPACK.jl package to solve the shooting equation. To compute the Jacobian of the shooting function we use the DifferentiationInterface.jl package with ForwardDiff.jl backend.
using DifferentiationInterface
import ForwardDiff
backend = AutoForwardDiff()Let us define the problem to solve.
# auxiliary function with aggregated inputs
shoot!(s, ξ) = shoot!(s, ξ[1], ξ[2:5]..., ξ[6:7], ξ[8:9],
ξ[10:11], ξ[12:13], ξ[14:15], ξ[16:17])
# Jacobian of the (auxiliary) shooting function
jshoot!(js, ξ) = jacobian!(shoot!, similar(ξ), js, backend, ξ)We are now in position to solve the problem with the hybrj solver from MINPACK.jl through the fsolve function, providing the Jacobian. Let us solve the problem and retrieve the initial contate and the times (switching and final) from the solution.
using MINPACK
# initial guess
ξ = [ pz0 ; t1 ; t2 ; t3 ; tf ; q1 ; p1 ; q2 ; p2 ; q3 ; p3]
# resolution of S(ξ) = 0
indirect_sol = fsolve(shoot!, jshoot!, ξ, show_trace=true)
# we retrieve the costate solution together with the times
pz0 = indirect_sol.x[1]
t1 = indirect_sol.x[2]
t2 = indirect_sol.x[3]
t3 = indirect_sol.x[4]
tf = indirect_sol.x[5]
q1 = indirect_sol.x[6:7]
p1 = indirect_sol.x[8:9]
q2 = indirect_sol.x[10:11]
p2 = indirect_sol.x[12:13]
q3 = indirect_sol.x[14:15]
p3 = indirect_sol.x[16:17]
println("pz0 = ", pz0)
println("t1 = ", t1)
println("t2 = ", t2)
println("t3 = ", t3)
println("tf = ", tf)
# Norm of the shooting function at solution
s = similar([pz0], 17)
shoot!(s, pz0, t1, t2, t3, tf, q1, p1, q2, p2, q3, p3)
println("Norm of the shooting function: ‖s‖ = ", norm(s), "\n")Iter f(x) inf-norm Step 2-norm Step time
------ -------------- -------------- --------------
1 1.729122e+01 0.000000e+00 0.257782
2 9.461468e-01 3.704268e+01 11.116600
3 2.839417e-01 7.649105e+00 0.004551
4 2.196746e-01 6.189414e+00 0.004537
5 4.899687e-02 1.555075e+01 0.004628
6 1.317601e-01 6.220299e+01 0.004467
7 3.647552e-01 1.399561e+02 0.004489
8 4.266673e-02 3.889313e+00 0.076011
9 1.862372e-01 1.555075e+01 0.004521
10 3.906691e-02 3.889347e+00 0.004490
11 6.814071e-02 3.887687e+00 0.004435
12 1.408918e-02 9.722099e-01 0.004535
13 4.460910e-02 3.887687e+00 0.004524
14 9.719317e-03 9.720021e-01 0.004481
15 4.894523e-02 3.887687e+00 0.004517
16 1.037975e-02 9.720452e-01 0.004473
17 1.722110e-02 9.719218e-01 0.004614
18 3.374491e-03 2.429959e-01 0.004561
19 1.050803e-02 9.719218e-01 0.004611
20 2.514214e-03 2.429847e-01 0.004553
21 1.236260e-02 9.719218e-01 0.004612
22 2.699892e-03 2.429877e-01 0.005093
23 4.405108e-03 2.429804e-01 0.006474
24 1.140801e-03 6.074605e-02 0.006511
25 2.529561e-03 2.429804e-01 0.006649
26 8.971382e-04 6.074537e-02 0.006585
27 3.105367e-03 2.429804e-01 0.006579
28 6.886897e-04 6.074555e-02 0.006460
29 1.114999e-03 6.074511e-02 0.006579
30 5.937321e-04 1.518634e-02 0.006495
31 6.886842e-04 6.074511e-02 0.028411
32 5.243157e-04 1.518629e-02 0.004528
33 7.780882e-04 6.074511e-02 0.004555
34 4.570424e-04 1.518630e-02 0.004544
35 7.861591e-04 6.074511e-02 0.004607
36 3.925009e-04 1.518631e-02 0.004597
37 7.834904e-04 6.074511e-02 0.004638
38 3.308893e-04 1.518631e-02 0.004547
39 7.850448e-04 6.074511e-02 0.004613
40 2.723456e-04 1.518631e-02 0.004500
41 7.867551e-04 6.074511e-02 0.004589
42 2.170459e-04 1.518631e-02 0.004499
43 7.883591e-04 6.074511e-02 0.004523
44 1.793299e-04 1.518631e-02 0.004537
45 7.899762e-04 6.074511e-02 0.005185
46 1.787759e-04 1.518631e-02 0.006612
47 2.839177e-04 1.518628e-02 0.006461
48 1.589777e-04 3.796573e-03 0.006482
49 1.503008e-04 1.518628e-02 0.006559
50 1.506639e-04 3.796570e-03 0.019264
51 1.968768e-04 1.518628e-02 0.004546
52 1.424838e-04 3.796571e-03 0.004532
53 1.995271e-04 1.518628e-02 0.004491
54 1.342526e-04 3.796571e-03 0.004491
55 1.981819e-04 1.518628e-02 0.004543
56 1.259568e-04 3.796571e-03 0.004523
57 1.983570e-04 1.518628e-02 0.004514
58 1.175940e-04 3.796571e-03 0.004605
59 1.986120e-04 1.518628e-02 0.004500
60 1.091543e-04 3.796571e-03 0.004549
61 1.988164e-04 1.518628e-02 0.004564
62 1.006264e-04 3.796571e-03 0.004566
63 1.990215e-04 1.518628e-02 0.004572
64 9.199662e-05 3.796571e-03 0.004556
65 7.942205e-05 3.796569e-03 0.005676
66 8.723075e-05 9.491426e-04 0.006466
67 7.506891e-05 3.796569e-03 0.013560
68 1.671472e-04 1.518628e-02 0.004447
69 6.666615e-05 3.796571e-03 0.004513
70 6.134118e-05 9.491423e-04 0.026959
71 4.993158e-05 3.796569e-03 0.004495
72 5.647323e-05 9.491424e-04 0.004524
73 4.774481e-05 3.796569e-03 0.004460
74 5.160142e-05 9.491424e-04 0.004497
75 4.774434e-05 3.796569e-03 0.004525
76 4.672441e-05 9.491424e-04 0.004491
77 4.776050e-05 3.796569e-03 0.004516
78 4.183996e-05 9.491424e-04 0.004478
79 4.777700e-05 3.796569e-03 0.004560
80 3.694531e-05 9.491424e-04 0.004546
81 4.779397e-05 3.796569e-03 0.010174
82 3.203694e-05 9.491424e-04 0.004467
83 4.781135e-05 3.796569e-03 0.004468
84 2.711018e-05 9.491424e-04 0.004533
85 4.782923e-05 3.796569e-03 0.004495
86 2.215862e-05 9.491424e-04 0.004522
87 4.784747e-05 3.796569e-03 0.004530
88 1.717279e-05 9.491424e-04 0.004570
89 4.786617e-05 3.796569e-03 0.004516
90 1.213745e-05 9.491424e-04 0.004537
91 4.788529e-05 3.796569e-03 0.004460
92 8.099732e-06 9.491424e-04 0.004504
93 2.324556e-05 1.548719e-03 0.010003
94 2.321027e-06 7.302762e-05 0.004494
95 2.874307e-06 7.491447e-05 0.004516
96 1.822005e-08 1.764322e-10 0.004496
97 4.612005e-09 9.546275e-12 0.004514
98 3.765876e-12 3.580419e-13 0.004510
pz0 = -10.103027162172838
t1 = 1.6450509469600771
t2 = 37.32398128558214
t3 = 37.580773578617396
tf = 42.713708753631714
Norm of the shooting function: ‖s‖ = 4.292890575169657e-12Let us plot the solution from the indirect method. We can notice that the second bang arc is well captured by the indirect method compared to the direct method.
# concatenation of the flows with the switching times
f = f1 * (t1, fs) * (t2, f1) * (t3, f0)
# computation of the solution: state, costate, control
indirect_sol = f((t0, tf), q0, [-1, pz0])
# plot in the Bloch ball
spin_plot(indirect_sol; size=(800, 400))
From the following plot, we can conclude that the maximisation condition from the PMP is now well satisfied compared to the solution obtained from the direct method.
plt = switching_plot(indirect_sol, H1, H01; size=(700, 800))
lens!(plt, [37.2, 37.7], [ 0, 4e-5], inset = (1, bbox(0.3, 0.2, 0.3, 0.4)))
lens!(plt, [37.2, 37.7], [-5e-4, 5e-4], inset = (2, bbox(0.3, 0.3, 0.3, 0.4)))
lens!(plt, [37.2, 37.7], [ 0.5, 1.1], inset = (3, bbox(0.3, 0.2, 0.3, 0.4)))
- 1B. Bonnard, O. Cots, S. Glaser, M. Lapert, D. Sugny & Y. Zhang, *Geometric optimal control of the contrast imaging problem in nuclear magnetic resonance, IEEE Trans. Automat. Control, 57 (2012), no. 8, 1957–1969.
- 2Bonnard, B.; Cots, O.; Rouot, J.; Verron, T. Time minimal saturation of a pair of spins and application in magnetic resonance imaging. Mathematical Control and Related Fields, 2020, 10 (1), pp.47-88. https://inria.hal.science/hal-01779377